pcb的四个过孔分别sda,scl,正,地。
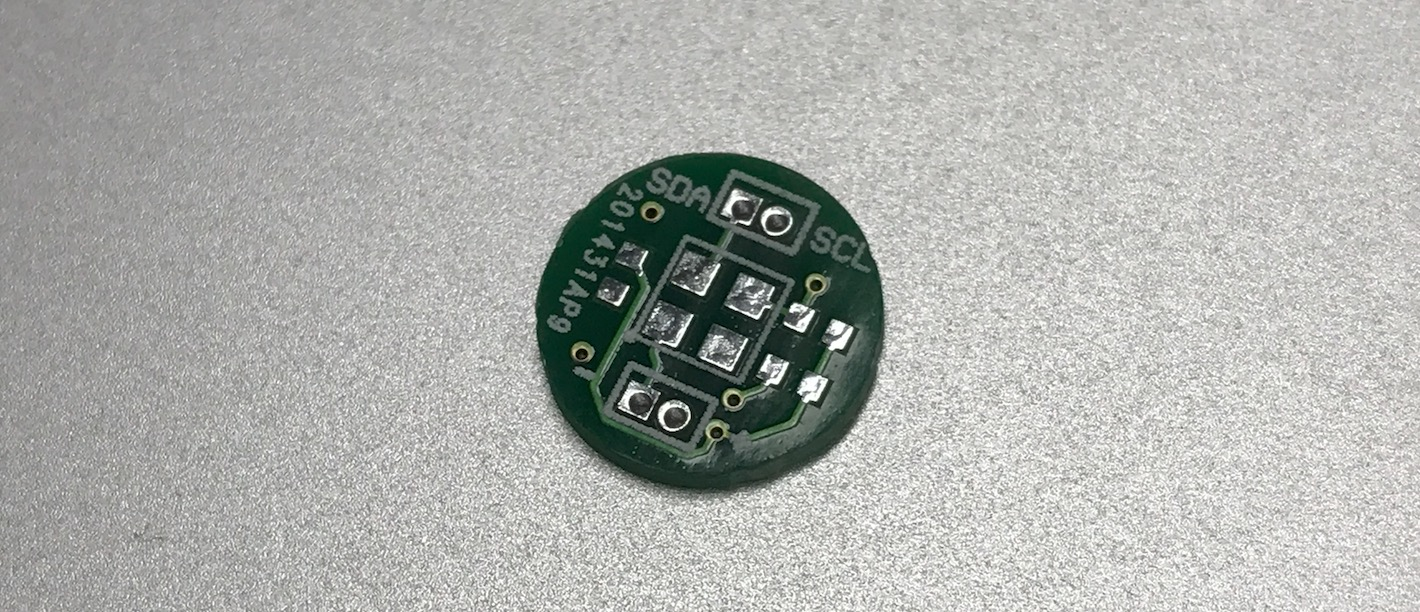
基于MS5837-30BA,可以测量300米深度,I2C通信。工作电压3.3 v,电源输入电压可以5.5 v。另一端是标准4-pin 连接器。这个传感器包括一个温度传感器,精度±1°C,数据也可以通过I2C输出。
示例代码和库文件:
MS5837_Library-master (1).zip (9.5 KB)
使用arduino的测试代码:
#include <Wire.h>
#include “MS5837.h”
MS5837 sensor;
void setup() {
Serial.begin(9600);
Serial.println(“Starting”);
Wire.begin();
sensor.init();
sensor.setFluidDensity(997); // kg/m^3 (997 freshwater, 1029 for seawater)
}
void loop() {
sensor.read();
Serial.print(“Pressure: “);
Serial.print(sensor.pressure());
Serial.println(” mbar”);
Serial.print(“Temperature: “);
Serial.print(sensor.temperature());
Serial.println(” deg C”);
Serial.print(“Depth: “);
Serial.print(sensor.depth());
Serial.println(” m”);
Serial.print(“Altitude: “);
Serial.print(sensor.altitude());
Serial.println(” m above mean sea level”);
delay(1000);
}














